Արդյունաբերական արտադրությունը կարևոր օղակ է տնտեսական և սոցիալական զարգացման խթանման համար։ Ներկայումս ավտոմատ եռակցման սարքավորումների հետազոտությունները խորանում են և բետոնի արտադրության մեջ լայնորեն կիրառվում են տարբեր տեսակի եռակցման կառուցվածքների արտադրության մեջ։
Ավտոմատ եռակցման գործընթացում, որոշակի չափով, անհրաժեշտ է ինտելեկտուալ և թվային կերպով կառավարել եռակցման հավաքման բացերի սխալը, այդ հիմքով հաշվի առնելով նաև աշխատանքային մասի դիրքի տարբերությունը, աշխատանքային մասի միացման շեղումը և այլ գործոններ։ Հետևաբար, լազերային եռակցման կարերի հետևման տեխնոլոգիան կարևոր դեր է խաղում եռակցման գործընթացում։
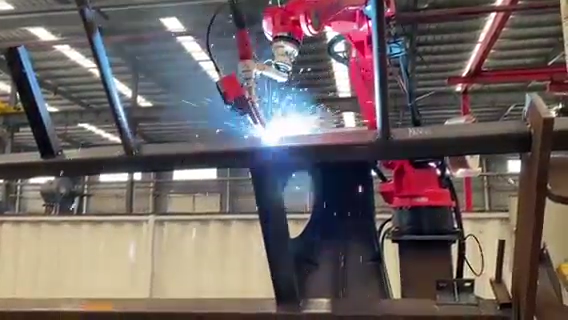
Ցեմենտային բաքի վագոնի հիմքի եռակցում Յոթ առանցք Երկրի ուղեծրում ութ առանցք պտույտ լազերային եռակցմամբ
- Աշխատանքային մասի դիրքը մեծապես տարբերվում է
- Շեղում կա աշխատանքային մասի միացման կետում
- Պահանջվում է բարձր եռակցման ճշգրտություն
- Վատ եռակցման միջավայր և ծուխ
Այս դեպքում, Yooheart ինտելեկտուալ HY1006A-145 ռոբոտը օգտագործվում է լազերային եռակցման կարերի հետևման համակարգով եռակցման համար, որն ունի բարձր ճկունություն, կայունություն և հուսալիություն։
Յուրաքանչյուր եռակցումից առաջ սարքավորումը նախ սկանավորում և գրանցում է եռակցման կարի կոորդինատը՝ եռակցման կարի տեղադրման միջոցով, այնուհետև ներքին ալգորիթմի միջոցով հաշվարկում է կոորդինատային շեղումը և տեղադրում հղման կոորդինատային պարամետրերը իրական ժամանակում՝ ժամանակի ընթացքում իրական շեղումը շտկելու և եռակցումից հետո արտադրանքի կնքումը և ամբողջականությունն ապահովելու համար։
«Չորս կետի հատման» մեթոդ
Ինչպես բոլորին հայտնի է, երկու կետերը որոշում են ուղիղ գիծ, բայց աշխատանքային մասի հավաքումը կձևավորի անկյուն, ավանդական ալգորիթմը չի կարող որոշել դրա դիրքը, սա պահանջում է «հատման» մեթոդի կիրառում ժամը չորսին, երկու հատվող գծերը ստեղծում են հատման կետ, հատուկ ալգորիթմը հայտնի չորս կետերի կոորդինատների որոշման միջոցով հաշվարկում է հատման կետի կոորդինատի դիրքը՝ եռակցման նպատակին հասնելու համար։

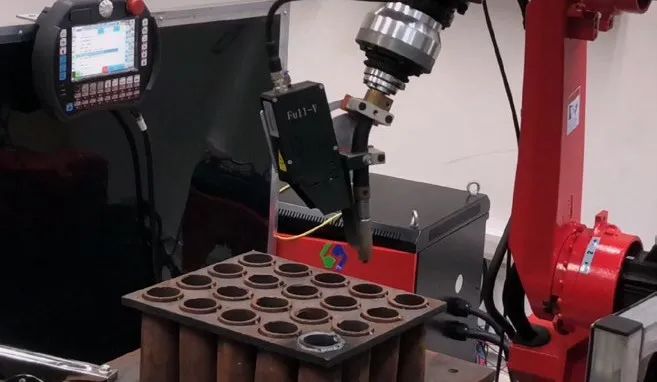
Լազերային կարերի հետևման համակարգ
Լազերային եռակցման կարերի հետևման համակարգը հիմնականում բաղկացած է լազերային սենսորներից և մոնիթորինգի տերմինալներից: Լազերային սենսորն օգտագործվում է եռակցման կարերի տեղեկատվության ակտիվ ձեռքբերման և իրական ժամանակում մշակման համար և պահպանում է իրական ժամանակում կապ արդյունաբերական ռոբոտների հետ: Մոնիթորինգի տերմինալը մոնիթորինգ է անում և կարգավորում սենսորները: Համակարգն ունի նաև եռակցումից առաջ տեղորոշման, հետևման և սկանավորման գործառույթներ՝ ինտելեկտուալ եռակցման կարիքները բավարարելու համար:
Աշխատանքային սկզբունք՝ եռակցման կարերի սկանավորում, կետային ամպի պատկերի համապատասխանեցում, ալգորիթմը ճշգրիտ նույնականացնում է առանձնահատկությունները, և հաշվարկման արդյունքների իրական ժամանակի տվյալները ուղարկվում են ռոբոտին՝ կառավարման հրահանգների վերածելով, փոփոխելով կամ ուղղորդելով ռոբոտի աշխատանքը։
Ծալքավոր թիթեղի լուծույթ

Կլոր անցքերի ավտոմատ խցանների եռակցման լուծում

Շրջանաձև կարի լուծում

Խողովակային թիթեղների լուծումներ
Yunhua Intelligent-ը կարող է ապահովել արագ տեղակայում, անվտանգ և արդյունավետ ավտոմատացման լուծումներ, ինչպես նաև իրական ժամանակի համակարգային լուծումներ: Լազերային տեսողության եռակցման կարերի հետևման համակարգը թույլ է տալիս եռակցման ռոբոտին իրական ժամանակում որոշել և հետևում եռակցման կարերի գտնվելու վայրը, ինչպես նաև շտկել եռակցման հետագիծը՝ համաձայն եռակցման գործընթացում եռակցման կարերի տեղաշարժի, որպեսզի իրականացվի իրական ինտելեկտուալ եռակցում:
Հրապարակման ժամանակը. Ապրիլ-09-2022



