Robotic Mig welding ----Street Lamp Pole եռակցման լուծում
Ցուցանիշ
1. Աշխատանքային մասի մասին տեղեկատվություն
2. Ռոբոտային եռակցման լուծման ակնարկ
3. Ռոբոտային եռակցման լուծման գործընթացը
4. Ռոբոտային լուծույթի սարքավորումների կոնֆիգուրացիա
5. Հիմնական գործառույթ 6. Սարքավորումների ներդրում
7. Տեղադրում, գործարկում և ուսուցում
8. Ստուգում և ընդունում
9. Բնապահպանական պահանջներ
10. Երաշխիքային և Հետո վաճառքի ծառայություն
11. Առաքման կից փաստաթղթեր
Ռոբոտային եռակցման կիրառման տեսանյութ
1, Workpiece Information
-Եռակցման մետաղալարերի տրամագիծը: Ф1.2 մմ
-Եռակցման գործընթացԳազով պաշտպանված զոդում/Միգ զոդում
-Եռակցման կարի տեսակըուղիղ գծի տեսակ, շրջանագծի տեսակ
-Պաշտպանիչ գազ:99% CO2
-Գործողության մեթոդ՝ ձեռքով բեռնում և բեռնաթափում, ռոբոտի ավտոմատ զոդում
-Տեղադրման սխալ:≤ 0,5 մմ
-Ափսեների մաքրում :եռակցման մեջ երևում է մետաղական փայլ ևերկու կողմերից եռակցման կարի կրկնակի բարձրության սահմաններում
2, ռոբոտային եռակցման լուծույթ Ընդհանուր ակնարկ
Աշխատանքի արդյունավետությունը բարելավելու համար, ըստ աշխատանքային մասի փաստացի իրավիճակի, Honyen գործարանը կտրամադրի եռակցման ռոբոտի աշխատանքային կայան, որը կարող է փոխարինվել տարբեր գործիքներով՝ տարբեր ապրանքների հետ համատեղելի լինելու համար:Աշխատանքային կայանը կազմված է ռոբոտի մոդելից՝ HY1006A-145 եռակցող ռոբոտ, եռակցման հոսանքի աղբյուր, հատուկ եռակցման ջահ ռոբոտի համար, էլեկտրական կառավարման պահարան և կոճակներ, ջրի հովացման սառեցնող սարք, կրկնակի աշխատանքային կայանի դիրքեր, Գործիքների հարմարանքներ, անվտանգության պաշտպանիչ ցանկապատ (ըստ ցանկության) և այլն։ մասեր.
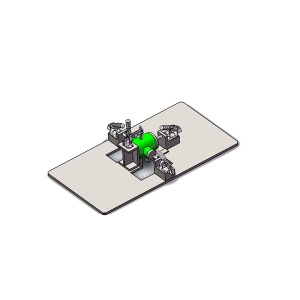
3, Mig Welding ռոբոտային աշխատանքային կայանի դասավորության ներածություն
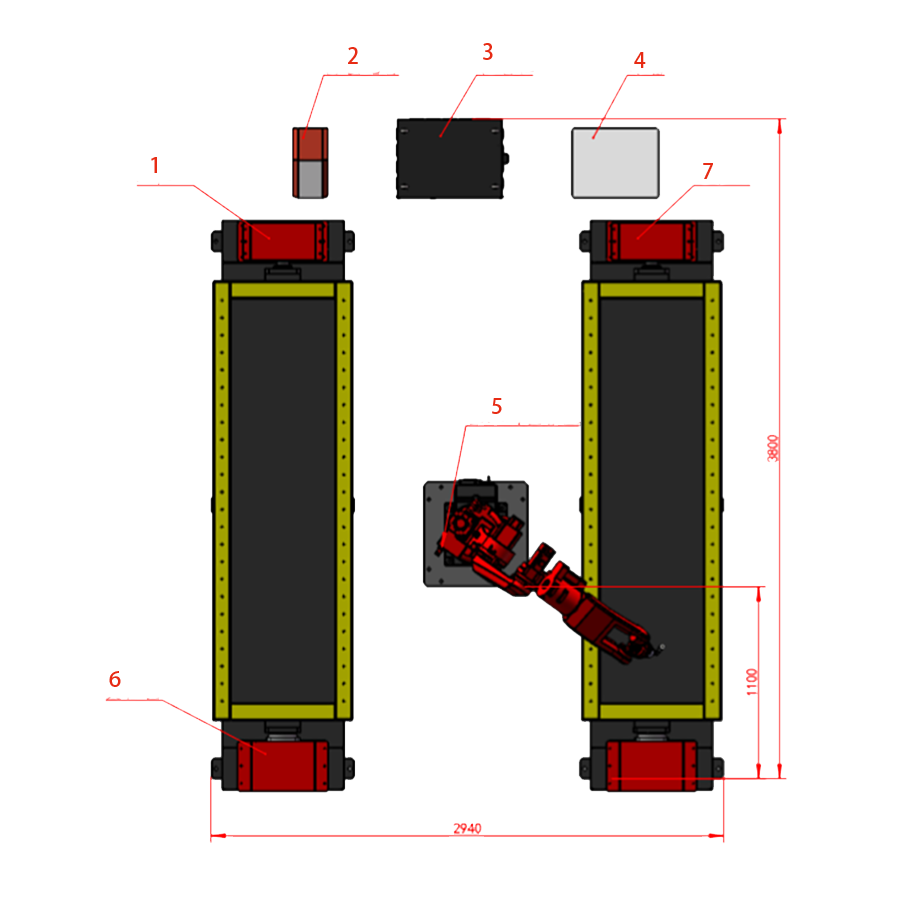
Honyen ռոբոտի աղեղային եռակցման աշխատանքային կայանի դասավորությունը
1, Աշխատանքային կայան 1
2, Եռակցման էներգիայի աղբյուր
3, Ռոբոտի վերահսկիչ
4, Ջրային հովացման չիլեր
5, Honyen աղեղային եռակցման ռոբոտ, HY1006A-145
6, Պաշտոնավար
7, Աշխատանքային կայան 2
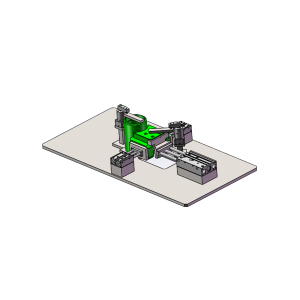
Էլեկտրական բևեռների մասերի հարմարանքներ
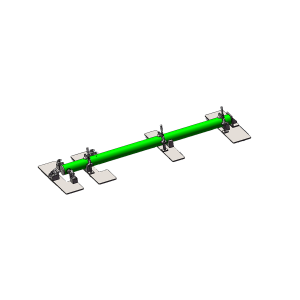
Էլեկտրական բևեռի մասերի հարմարանքներ 2
Ռոբոտային եռակցման լուծումներ Դասավորություն 1
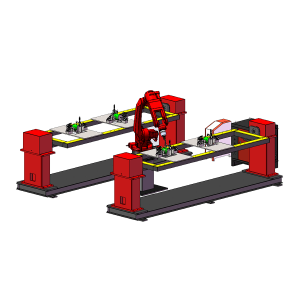
Էլեկտրական բևեռի մասերի հարմարանքներ 3
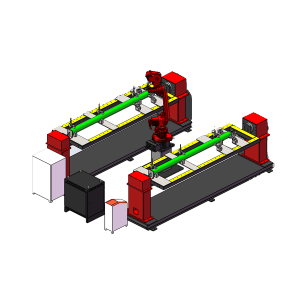
Ռոբոտային եռակցման լուծումներ Դասավորություն 2
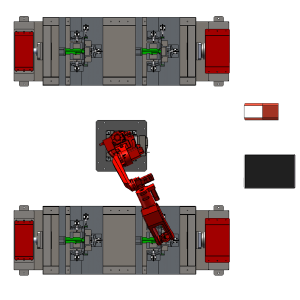
Ռոբոտային եռակցման լուծումներ Դասավորություն 3
4. Ռոբոտային եռակցման լուծման գործընթացը I. Օպերատորը բեռնում է աշխատանքային մասը 1-ին կայարանում, այն բեռնելուց և սեղմելուց հետո:Օպերատորը սեղմում է ռոբոտի ամրագրման մեկնարկի կոճակը 1, և ռոբոտը սկսում է ավտոմատ զոդում;
II.Օպերատորը գնում է 2 կայան՝ աշխատանքային մասի բեռնման համար:Աշխատանքային մասի բեռնումից հետո Օպերատորը սեղմում է ռոբոտի ամրագրման մեկնարկի կոճակը 2 և սպասում, որ ռոբոտը ավարտի եռակցումը.
III.Այն բանից հետո, երբ ռոբոտն ավարտում է եռակցումը 1-ին կայարանում, այն ավտոմատ կերպով իրականացնում է 2-րդ կայանի ծրագիրը.
Ⅳ.Այնուհետև Օպերատորը բեռնաթափում է աշխատանքային մասը 1-ին կայարանում և բեռնում է նոր աշխատանքային մասը.
V. ցիկլը հաջորդականությամբ.
5. Ռոբոտային լուծույթի սարքավորումների կոնֆիգուրացիա
| Նյութ | Մոդել | Քանակ | Ապրանքանիշը | Դիտողություններ | ||
| 1 | 1.1 | Ռոբոտի մարմին | HY1006A-145 | 1 Կոմպլեկտ | Հոնյեն | Ներառյալ ռոբոտի մարմին, կառավարման կաբինետ, դասավանդող ծրագրավորող |
| 1.2 | Ռոբոտների կառավարման կաբինետ | 1 հավաքածու | ||||
| 1.3 | Եռակցման էներգիայի աղբյուր | 1 Կոմպլեկտ | Հոնյեն | Megmeet welder | ||
| 1.4 | ջրի բաք | 1 Կոմպլեկտ | Հոնյեն | |||
| 1.5 | Ջրի սառեցման եռակցման ջահ | 1 Կոմպլեկտ | Հոնյեն | |||
| 2 | 1 առանցքի դիրքավորող | HY4030 | 2 Կոմպլեկտ | Հոնյեն | 2,5 մ, 300 կգ բեռնվածություն, 1,5 կՎտ գնահատված ելքային հզորություն | |
| 3 | Էլեկտրական կառավարման կայան | 2 Կոմպլեկտ | Հոնյեն | |||
| 4 | Համակարգի նախագծում, ինտեգրում և ծրագրավորում | 1 Կոմպլեկտ | Հոնյեն | |||
| 5 | Անվտանգության պարիսպ | 1 Կոմպլեկտ | Հոնյեն | Ընտրովի | ||
6. Հիմնական գործառույթը Եռակցման որակը և արդյունավետությունն ապահովելու համար ռոբոտային համակարգը հագեցած է ինքնապաշտպանության կատարյալ գործառույթով և աղեղային եռակցման տվյալների բազայով:Հիմնական գործառույթները հետևյալն են.
Վերսկսել սկզբնական ուղինԵրբ պաշտպանիչ գազի հոսքը աննորմալ է, եռակցման մետաղալարը սպառվում և ժամանակավորապես դադարեցվում է եռակցման ժամանակ, «շարունակել եռակցումը» հրամանը կարող է անմիջապես կանչվել անսարքությունների վերացումից հետո, և ռոբոտը կարող է ավտոմատ կերպով շարունակել եռակցումը ցանկացած դիրքից մինչև կասեցված դիրք:
Սխալների հայտնաբերում և կանխատեսումՏագնապը տեղի ունենալուց հետո Robot-ը տվյալներ է ստանում կառավարման սարքից, ենթադրում է անսարքության մասեր և իր հերթին տալիս է բարձր անսարքության մասերի ցանկը, ցուցադրում է բաղադրիչների փոխարինման և ախտորոշման հաջորդականությունը համակարգչում, որը կարող է դիտվել տեղում ուսումնական կախազարդով:Բացի այդ, համակարգիչը պարբերաբար ստանում է աշխատանքի տվյալներ ռոբոտից, վերլուծում է ստացված տվյալները, դատում, թե արդյոք ռոբոտի աշխատանքային վիճակը նորմալ է, և օգտվողին հուշում է զբաղվել առաջիկա անսարքությամբ:
Հակաբախման գործառույթԵրբ ռոբոտի եռակցման ջահը բախվում է արտաքին առարկաներին, ռոբոտի հակաբախման սարքն աշխատում է պաշտպանելու եռակցման ջահը և ռոբոտի մարմինը:
Փորձագիտական տվյալների բազածրագրում եռակցման անհրաժեշտ պայմանները սահմանելով՝ այս համակարգը կարող է ավտոմատ կերպով ավարտել եռակցման կարի դասավորությունը և համապատասխան եռակցման պարամետրերի կարգավորումը:
Դասավանդում և ծրագրավորումԻրականացնել տեղում ծրագրավորում ուսուցման կախազարդի միջոցով:
Հյուսել զոդումԵռակցման գործընթացում Robot-ը կարող է ոչ միայն իրականացնել սովորական ճոճանակային եռակցման կլոր տեսակը և նաև Z տիպը:Սա օգնում է ռոբոտին գիտակցել հաճախորդի ճոճվող եռակցման գործառույթը՝ ըստ աշխատանքային կտորի ձևի, որպեսզի մեծացնի եռակցման կարի լայնությունը՝ եռակցման ուժով և եռակցման լավ կատարմամբ:
Կարգավիճակի ցուցադրումռոբոտը կարող է ցուցադրել ամբողջ ռոբոտային համակարգի աշխատանքի կարգավիճակը դասավանդման կախազարդի միջոցով, ներառյալ ծրագրի գործողության կարգավիճակը, եռակցման գործընթացի պարամետրերի փոփոխությունները, համակարգի պարամետրերի փոփոխությունները, ռոբոտի ներկայիս դիրքը, կատարման պատմության գրառումները, անվտանգության ազդանշանները, ազդանշանային գրառումները և այլն, որպեսզի հաճախորդները կարողանան ժամանակին հասկանալ ռոբոտների համակարգի կարգավիճակը և նախապես կանխել խնդիրները:
Մուտք / ելքային ֆայլերՌոբոտի համակարգի ֆայլերը և ծրագրային ֆայլերը ռոբոտային համակարգում կարող են պահվել SD քարտում Robot կարգավորիչի ներսում, ինչպես նաև կարող են պահպանվել արտաքին սարքավորումներում:Օֆլայն ծրագրավորման ծրագրերով գրված ծրագրերը կարող են նաև բեռնվել Robot Controller-ի մեջ: Սա օգնում է հաճախորդներին կանոնավոր կերպով կրկնօրինակել համակարգի ֆայլերը, Երբ ռոբոտի համակարգում խնդիր առաջանա, այդ կրկնօրինակը կարող է վերականգնվել՝ լուծելու համար ռոբոտի խնդիրները:
7, Սարքավորումների ներդրում HY1006A-145-ը խելացի ֆունկցիայով բարձր արդյունավետությամբ ռոբոտ է:Այն հարմար է գազով պաշտպանված եռակցման և կտրման ծրագրերի համար:Դրա առանձնահատկությունն է թեթև քաշը և կոմպակտ կառուցվածքը:
Աղեղային եռակցման կիրառման համար Honyen-ը հաջողությամբ նախագծել է թեթև քաշ և կոմպակտ թեւ, որը ոչ միայն ապահովում է օրիգինալ հուսալիություն, այլև ապահովում է ծախսերի գերազանց կատարում:
Honyen-ն ընդունում է ամենաառաջադեմ սերվո տեխնոլոգիան, որը կարող է բարելավել ռոբոտի շարժման արագությունն ու ճշգրտությունը, նվազագույնի հասցնել օպերատորի միջամտությունը և բարելավել գազի պաշտպանված եռակցման և կտրման աշխատանքային արդյունավետությունը:
| Առանցք | Օգտակար բեռ | Կրկնելիություն | Էլեկտրաէներգիայի հզորությունը | Շրջակա միջավայր | Քաշը | Տեղադրում |
| 6 | 10 | 0.08 | 6,5 ԿՎԱ | 0~45℃20~80%RH (առանց խոնավության) | 300 կգ | Գետնին/Առաստաղ |
| Շարժման միջակայք J1 | J2 | J3 | J4 | J5 | J6 | IP մակարդակ |
| ±170° | +80°~-150° | +95°~-72° | ±170° | +115°~-140° | ±220° | IP54/IP65 (դաստակ) |
| Առավելագույն արագություն J1 | J2 | J3 | J4 | J5 | J6 | |
| 158°/վրկ | 145°/վրկ | 140°/վրկ | 217°/վրկ | 172°/վրկ | 500°/վրկ |
Ամբողջական չինական գործառնական ինտերֆեյս և կարող է փոխարկվել անգլերենի ստեղնաշարի ամբողջական գործարկմամբ
Աջակցեք տարբեր հաղորդակցություններին, ներառյալ I/O ինտերֆեյսը, Modbus, Ethernet և այլն:
Աջակցեք բազմաթիվ ռոբոտների և այլ արտաքին սարքավորումների միացմանը
Մեծ չափի գունագեղ սենսորային էկրան
Կազմաձևված հակաբախման սարք, որը պաշտպանում է ռոբոտի թեւը և նվազեցնում միջամտությունը
Robot Motion Control-ը ապահովում է ճանապարհի օպտիմալ պլանավորում
Հարյուրավոր ներկառուցված ֆունկցիոնալ պայուսակներ և գործառույթներ պարզեցնում են ծրագրավորումը
SD քարտի միջոցով հարմար է տվյալների կրկնօրինակում և պատճենում
Պաշտոնավար

Honyen Head-tail-ի կրկնակի աջակցության դիրքավորող սարք, որն օգտագործվում է աշխատանքային մասը պտտելու, ռոբոտի հետ համագործակցելու, եռակցման լավ դիրքի հասնելու և եռակցման լավ կատարման հասնելու համար
Եռակցման Էլեկտրաէներգիայի աղբյուր

Megmeet Ehave cm 500h / 500 / 350 series լրիվ թվային արդյունաբերական ծանր բեռ * CO2 / MAG / MMA խելացի եռակցման մեքենա
8. Տեղադրում, գործարկում և ուսուցում
Մինչ առաքումը ռոբոտային համակարգը կհավաքվի և ամբողջությամբ կգործարկվի մեր ընկերությունում:Հաճախորդը կառաքի իր մասերը մեր ընկերությանը փորձնական եռակցման և նախնական ընդունման համար մինչև առաքումը:Նախնական ընդունման ընթացքում Հաճախորդի օպերատորները կստանան նախնական տեխնիկական ուսուցում:
Տեղադրման պլանը և տեխնիկական պահանջները հաճախորդին կներկայացվեն տեղադրումից 15 օր առաջ, և հաճախորդը պետք է ժամանակին նախապատրաստվի՝ համաձայն պահանջների:Մեր ընկերությունը կուղարկի ինժեներներ՝ օգտատիրոջ կայքում համակարգի տեղադրման և շահագործման հանձնելու համար:Պայմանով, որ հաճախորդը ապահովում է գործարկման համար բավարար աշխատանքային մասեր, ծրագրավորման գործարկումից, անձնակազմի վերապատրաստումից մինչև զանգվածային փորձնական արտադրություն ժամանակը չպետք է գերազանցի 10 օրը:Մեր ընկերությունը հաճախորդների համար վերապատրաստում է ռոբոտների համակարգերի ծրագրավորման, շահագործման և սպասարկման օգտատերերին, և վերապատրաստվողները պետք է ունենան համակարգչի հիմնական գիտելիքներ:
Տեղադրման և շահագործման ընթացքում հաճախորդը պետք է տրամադրի անհրաժեշտ գործիքներ, ինչպիսիք են բարձրացնող սարքավորումը, բեռնատարը, մալուխները, հարվածային գայլիկոնը և այլն, և տրամադրի ժամանակավոր օգնություն բեռնաթափման և տեղադրման ժամանակ:
Մեր ընկերությունը պատասխանատու է օպերատորի ուղղորդման, տեղադրման, սարքավորումների շահագործման և վերապատրաստման համար:Մեր ընկերությունը պատասխանատու է սպասարկման և շահագործման ուսուցման համար:Օպերատորը ինքնուրույն կշահագործի և կպահպանի սարքավորումները:Դասընթացի բովանդակություն. սարքավորումների կառուցվածքի սկզբունք, ընդհանուր էլեկտրական անսարքությունների վերացում, ծրագրավորման հիմնական հրահանգների ներածություն, տիպային մասերի ծրագրավորման հմտություններ և ծրագրավորման մեթոդներ, սարքավորումների շահագործման վահանակի ներդրում և նախազգուշական միջոցներ, սարքավորումների շահագործման պրակտիկա և այլն:
9. Ստուգում և ընդունում
Նախնական ընդունումը կատարվում է մեր ընկերությունում՝ երկու կողմերի համապատասխան աշխատողների մասնակցությամբ։Նախնական ընդունման ընթացքում աշխատանքային մասերը պետք է փորձարկվեն ըստ հաճախորդի կողմից տրամադրված աշխատանքային մասի ճշգրտության, միայն որակավորված աշխատանքային մասը պետք է եռակցվի, և նախաընդունման փորձարկման հաշվետվությունը պետք է թողարկվի:Ավարտելուց հետո Ռոբոտը կառաքվի:Նախաընդունումն ապահովելու նպատակով նորմալ արտադրության համար կտրամադրվի 3 աշխատանքային կտոր։
10.Բնապահպանական պահանջներ Անվտանգության պահանջներ. օգտագործողների կողմից օգտագործվող գազը և պահեստամասերը պետք է համապատասխանեն համապատասխան ազգային ստանդարտներին:
Օդի աղբյուրը պետք է տեղադրվի դրսում, կրակից ոչ պակաս, քան 15 մ, գազից և թթվածնից ոչ պակաս, քան 15 մ հեռավորության վրա:Օդի աղբյուրը պետք է պահպանի լավ օդափոխության պայմանները և լինի զով տեղում, հեռու քամուց:
Գազի բոլոր սխեմաները պետք է ստուգվեն ռոբոտն օգտագործելուց առաջ:Եթե օդի արտահոսք կա, այն պետք է վերանորոգվի, որպեսզի համոզվեք, որ սխալ չկա:
ճնշումը կարգավորելիս և գազի բալոնը փոխելիս օպերատորը ձեռքերին չպետք է ունենա նավթային նյութեր:
շրջակա միջավայրի խոնավությունը. ընդհանուր առմամբ, շրջակա միջավայրի խոնավությունը 20% ~ 75% RH է (կոնդենսացիայի բացակայության դեպքում);Կարճաժամկետ (1 ամսվա ընթացքում) 95% RH-ից պակաս (դեպքեր առանց խտացման):
սեղմված օդ՝ 4,5 ~ 6,0 կգ/սմ2 (0,45-0,6 մփա), ֆիլտրի յուղ և ջուր, ≥ 100լ/ր
Հիմք. բետոնի նվազագույն ամրությունը C25 է, իսկ հիմքի նվազագույն հաստությունը՝ 400 մմ
թրթռում. հեռու պահել թրթռման աղբյուրից
էլեկտրամատակարարում. բոլոր արտադրված էլեկտրական և էլեկտրոնային սարքավորումների էլեկտրամատակարարումը ընդունում է 50 Հց (± 1) և 380 Վ (± 10%) եռաֆազ AC լարում, ապահովելու համար էլեկտրամատակարարման առաջնային հիմնավորումը:
Հաճախորդների կողմից մատուցվող ծառայություններ տեղում.
առաքումից առաջ բոլոր անհրաժեշտ նախապատրաստությունները, ինչպիսիք են հիմքը, անհրաժեշտ եռակցման աշխատանքները, օժանդակ գործիքների ամրացումը և այլն:
բեռնաթափում և տեղափոխում հաճախորդի տեղում:
11. Երաշխիքային և Հետո վաճառքի ծառայություն Եռակցման էներգիայի աղբյուրի երաշխիքային ժամկետը 12 ամիս է:
Ռոբոտի մարմնի երաշխիքային ժամկետը 18 ամիս է։
Սովորական օգտագործման ժամանակ խափանվելու կամ վնասվելու դեպքում, և սարքավորումը գտնվում է երաշխիքային ժամկետում, մեր ընկերությունը կարող է անվճար վերանորոգել կամ փոխարինել մասերը EXW (բացառությամբ սպառվող նյութերի, սպասարկման արտադրանքի, անվտանգության խողովակների, ցուցիչի լույսերի և մեր ընկերության կողմից հատուկ նշանակված այլ ծախսվող նյութերի):
Առանց երաշխիքի խոցելի մասերի համար մեր ընկերությունը խոստանում է նորմալ սպասարկման ժամկետ և խոցելի մասերի մատակարարման գին, իսկ սարքավորումներն ունեն սարքավորումների մատակարարման կայուն ալիք մինչև հինգ տարի:
Երաշխիքային ժամկետից դուրս մեր ընկերությունը կշարունակի մատուցել ցմահ վճարովի ծառայություն և տրամադրել համապարփակ տեխնիկական աջակցություն և անհրաժեշտ սարքավորումների պարագաներ:
12. Առաքման կից փաստաթղթեր Տեղադրման գծագրեր. սարքավորումների հիմքի կառուցման գծագրեր և սարքավորումների տեղադրման գծագրեր
◆ նախագծային գծագրեր. հարմարանքների և սարքավորումների գծագրեր
◆ Ձեռնարկ. սարքավորումների շահագործման ձեռնարկ, սպասարկման ձեռնարկ և ռոբոտի շահագործման ձեռնարկ
◆ պարագաներ՝ առաքման ցուցակ, վկայական և երաշխիքային քարտ։



